
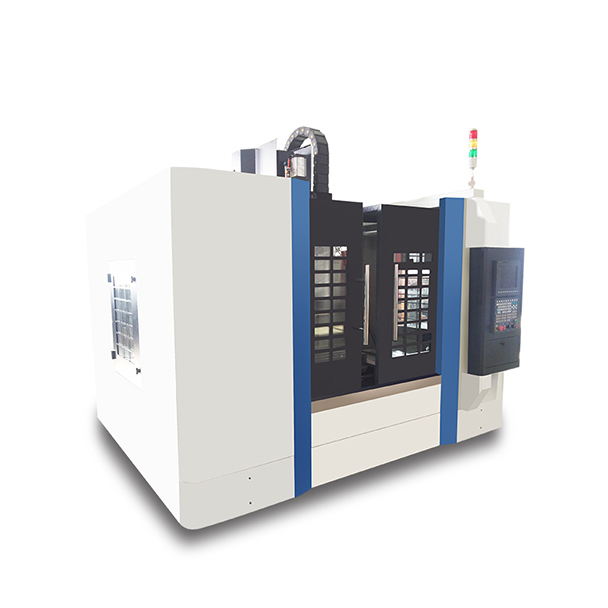


vmc1060 tehdasmetallinen 3-akselinen pystysuora cnc-jyrsinkonekeskus
Etu
1. Valinnainen CNC-levysoitin voi muodostaa neliakselisen ja viiden akselin koordinaattikytkentäkäsittelyn.
2. Valinnainen automaattinen lastunpoistolaite, jonka pohjarakenne varmistaa sisäisen puhtauden;valinnainen karaöljyjäähdytys jne.
3. Valu läpikäy kaksi vanhentamiskäsittelyä materiaalin jäännösjännityksen poistamiseksi.
4. X-, Y-, Z-suuntaiset ohjaimet voivat valita Taiwanin raskaat lineaariset palloohjaimet, joilla on nopea nopeus, korkea jäykkyys ja niin edelleen.

Erittely
| Tuote | VMC1060 | ||||
| Työpöydän koko (pituus × leveys) mm | 1300×600 | ||||
| T-aukko (mm) | 5-18×100 | ||||
| Suurin kuormauspaino työpöydälle (KG) | 650 | ||||
| X-akselin liike (mm) | 1000 | ||||
| Y-akselin liike (mm) | 600 | ||||
| Z-akselin liike (mm) | 600 | ||||
| Karan nokan ja pöydän välinen etäisyys (mm) | 100-700 | ||||
| Karan keskikohdan ja pilarin välinen etäisyys (mm) | 667 | ||||
| Karan kartio | BT40/50 | ||||
| Max.karan nopeus (rpm) | 8000/10000/12000 | ||||
| Karan moottorin teho (kw) | 15.11 | ||||
| Nopea syöttönopeus: X,Y,Z-akseli (m/min) | 16.16.2016 (24.24.24 liner guidway) | ||||
| Nopea leikkausnopeus (m/min) | 10 | ||||
| Paikannustarkkuus (mm) | ±0,005 | ||||
| Toista paikannustarkkuus (mm) | ±0,003 | ||||
| Automaattinen työkalunvaihtotyyppi | 16 työkalun päätyyppinen työkalunvaihtaja (valinnainen 24 varren tyyppinen automaattinen työkalunvaihtaja) | ||||
| Max.työkalun pituus (mm) | 300 | ||||
| Max.Työkalun halkaisija | Φ80 (viereinen työkalu) / φ150 (ei viereinen työkalu) | ||||
| Työkalun maksimipaino (KG) | 8 | ||||
| Työkalun vaihtoaika (työkalusta työkaluun) s | 7 | ||||
| Ilmanpaine (Mpa) | 0.6 | ||||
| Koneen paino (kg) | 7500 | ||||
| Kokonaiskoko (mm) | 3340*2800*2700 | ||||
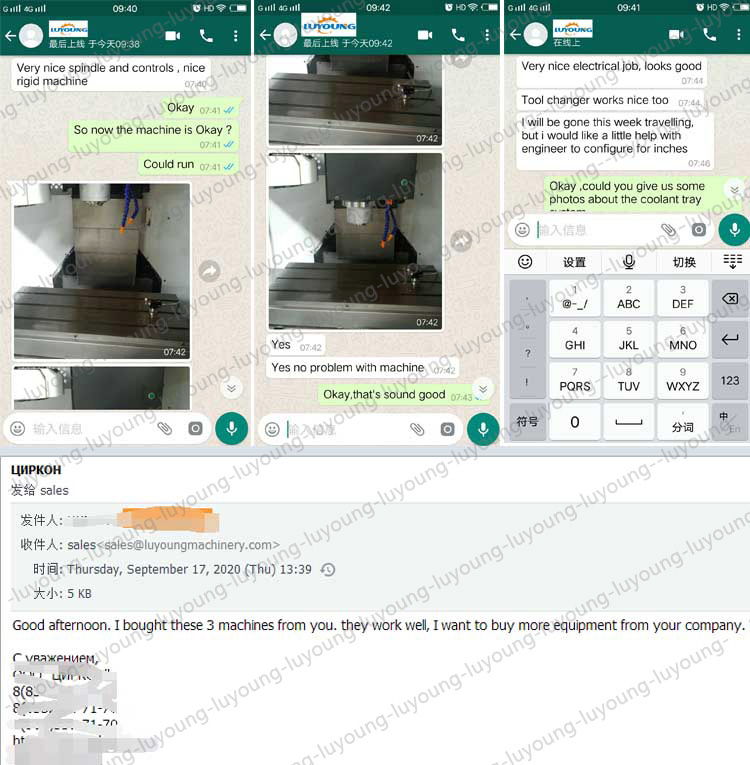
Miksi valita meidät
Saamme paljon hyvää palautetta asiakkailta mm.
Erittäin hyvä kara ja ohjaimet, mukava jäykkä kone.Todella hieno sähkötyö, näyttää hyvältä.
Työkalunvaihtajakin toimii hyvin.
Ostin sinulta 3 konetta.Ne toimivat hyvin, haluan ostaa lisää laitteita yrityksestäsi.
Koneen testaus
1. Lineaarisen liikkeen paikannustarkkuuden havaitseminen on suoritettava kuormittamattomissa olosuhteissa, ja lasermittaus on ensisijainen.
2. Lineaarisen liikkeen toistuvan paikannustarkkuuden tunnistus, havaitsemiseen käytetty instrumentti on sama kuin paikannustarkkuuden havaitsemiseen käytetty instrumentti.
3. Lineaarisen liikkeen alkupisteen paluutarkkuuden havaitseminen.
4. Lineaarisen liikkeen käänteisen virheen havaitseminen mitataan useita kertoja (yleensä 7 kertaa) kolmessa paikassa lähellä iskun keskipistettä ja molempia päitä, ja kunkin sijainnin keskiarvo lasketaan ja saadun keskiarvon maksimiarvo on käänteinen Error-arvo.

Tuoteluokat
-

BC6085 Tehdashintainen muotoilutyöstökone ...
-

TCK25 pieni automaattinen korkealaatuinen jengityyppinen sl...
-

C6140/C6240 välipohjainen metallikeskisorvikone
-

VMC650 Nopea 3-akselinen pystysuora metalli cnc mil...
-

H50 metallisorvaus cnc-yhdistelmäsorvi jyrsintäkone...
-

BC6050 korkealaatuinen metallin muotoilukone





